Perkembangan teknologi informasi serta otomasi industri sangat pesat.
Komputer sebagai bagian yang tak terpisahkan dengan industri itu
sendiri, mau tidak mau dan tidak bisa dihindari akan ber integrasi
dengan disiplin ilmu ilmu lain seperti mekanika, elektronika,
pemrograman dan lain lain. Munculnya mekatronika (ilmu mekanik dan
elektronika), dalam berbagai wujud (misal alat alat industri termasuk
robot), kemudian ditambah “kecerdasan buatan” sebagai otaknya, maka
muncullah wujud robot yang cerdas.
Robotika adalah perpaduan berbagai disiplin ilmu, khususnya mekanik,
elektronik dan komputer. Perpaduan mekanik dan elektronik, bisa tercipta
robot robot sederhana yang memiliki banyak manfaat, baik manfaat
hiburan atau yang lebih serius untuk membantu berbagai bidang misal
bidang industri. Sedangkan mekatronika (mekanik dan elektronika)
ditambah unsur komputer (khususnya pemrograman) sebagai otak buatan,
terciptalah robot yang cerdas, dengan berbagai bentuk dan manfaatnya.
Robotika adalah multidisiplin dengan komputer, elektronika dan
mekanika sebagai ilmu dasarnya. Namun begitu tidak terbatas bagi
pengajar untuk melibatkan ilmu-ilmu lain seperti biologi dan anatomi.
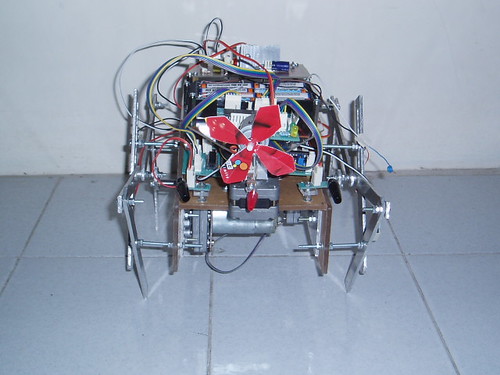
Dengan robotics walker kit (kit robot berkaki/ berjalan), para
guru/dosen dapat melibatkan siswanya untuk mengamati gerakan kaki
serangga dan mensimulasikannya sebelum diprogram ke robot walking kit (2
kaki, 4 kaki atau 6 kaki).
Nah……Lembaga Pendidikan Robotika Unik Robot Purwokerto, mencoba
menyediakan dan menyalurkan kegemaran dan pengetahuan robotika, serta
merancang standar kurikulum bagi siswa SD, SLTP, SLTA, hingga mahasiswa
serta hobiis (penggemar).
Siswa / mahasiswa sebagai obyek pelatihan dan pendidikan dituntut
aktif dan kreatif serta terlibat langsung dalam proses perakitan,
pengoperasian serta mempraktekan materi materi latihan yang tersedia.
Justru hal hal itulah (aktif, bebas berkreasi, praktek langsung) yang
menjadikan pelatihan robotika menjadi menyenangkan.
Tentu saja materi serta kurikulum disesuaikan dengan tingkat
kemampuan peserta didik / peserta pelatihan. Untuk siswa SD, lebih pada
”bermain” robot dengan tetap menjaga unsur pendidikan. Merakit berbagai
bentuk mesin/ mekanik dan merangkai sistem elektroniknya ( untuk
mempalajari, gear, roda, dinamo motor, batu batre, dll), menjadi materi
materi awal robotika untuk Siswa SD.
Materi awal tersebut, tentu saja semua diawali pengtahuan awal,
tentang apa itu robot, apa gunanya, jenis jenisnya, juga sejarah robot.
Belajar robotika dengan mempelajari mekanik dan elektronik saja, sudah
bisa tercipta berbagai jenis robot mekanik, atau berbagai robot mainan.
Tentu saja diharapkan mereka mempelajari dan memperhatikan sistem kerja
robot robot tersebut.
Pada tingkat SLTP dan SLTA, selain belajar mekanik (diumpamakan
sebagai badan pada manusia / mahluk hidup lain), kemudian belajar
elektronik (diumpamakan sebagai panca indra pada manusia/ mahluk hidup
lain, karena bisa berupa sensor sensor), juga mulai mempelajari
pemrograman (sebagai otaknya robot).
Pada tingkat perguruan tinggi, atau juga untuk para hobiis (ada lho
penggemar yang ”sudah bapak bapak”, untuk bersantai dari rutinitas kerja
katanya), materi robotika mengajak mereka tidak hanya mengerti prinsip
dasar robotika dan pemrograman namun juga ditantang untuk memodifikasi
program dan konstruksi robot. Pemrograman micro-controller menjadi
pilihan dimana mahasiswa diajak untuk belajar pemrograman
microcontroller mulai dari yang sangat sederhana mengaktifkan flip-flop
hingga menjalankan manipulator robot. Selain itu, pelatihan
micro-controller dengan robotics kit memberikan banyak kemungkinan dan
sangat bervariasi.
Robotics kit dapat juga digunakan dalam implementasi artificial
intelligent (AI), / kecerdasan buatan, sistem sensor, model sistem
otomasi kontrol dan bagi yang sekedar hobi, kit dapat ditambahkan
aksesories seperti sensor, kamera, motor, rangkaian elektronika hingga
kepengembangan software dan modifikasi kit.
Belajar pemrograman dengan objek robot membuat proses belajar menjadi
lebih menarik dan nyata. Mulai dengan pemrograman Basic hingga ke
pemrograman C, siswa secara bertahap belajar pemrograman sehingga
pemahaman komputer hanya untuk mengetik dan bermain akan bergeser
menjadi pemikiran bahwa komputer telah menjadi bagian dari teknologi
sistem kontrol dan akusisi data. Wah….rumit ya? …..nggak juga, baca
terus deh artikel ini….
Pemrograman Robot, tidak sulit lho……..
Hal yang biasanya ditakuti siswa dalam belajar robotika adalah
pemrograman. Walaupun belajar robotika, tanpa pemrograman, sudah bisa
tercipta berbagai robot sederhana (robot non programming).
Dengan berkembangnya tehnologi, kita bisa ”memilih” jenis pemrograman
robot mau yang mudah atau yang sulit. Untuk yang relative gampang,
bahkan anak anak SD juga bisa membuat programnya, bisa kita pilih
pemrograman grafis. Pemrograman grafis yaitu dengan menyusun gambar
gambar sebagai simbol dari item program.
Misal kita pilih gambar dinamo motor, bisa kita pilih, kecepatan
putarmotor, juga mau berputar searah atau berlawanan dengan jarum jam.
Pilih gambar ”jam pasir” misalnya, kemudian kita bisa pilih motor
berputar berapa waktu (detik, menit atau jam), dst…dst… Kombinasi
kombinasi gambar dan pilihan, akan banyak sekali variasinya. Kreativitas
memilih, menyusun simbol simbol tersebut menjadi program dan otak
robot, manjadi sangat menarik.
Pemrograman yang relativ lebih rumit yaitu dengan bahasa program
(pemrograman Basic hingga ke pemrograman bahasa C), dengan menulis dan
mengetik satu persatu ”perintah2” yang kita inginkan. Mau lebih mudah?
Bisa juga dengan copy paste dari program program yang sudah jadi.
Artinya, pemrograman robot itu tidak sulit.
Mau belajar Robotika?
Ayo dong anak anak Indonesia, jangan hanya jadi USER tapi juga bisa
jadi MAKER. (Jangan hanya jadi pengguna, tapi juga pembuat …. bener gak
tuh bahasa Inggrisnya?).
:strip_icc():format(jpeg)/liputan6-media-production/medias/1460754/original/087142400_1483521262-Kuri_Robot.jpg)